 中文
中文 ENG
ENG





小優智能科技有限公司成立于2015年底,是一家專注于高精度3D機器視覺模組研發、生產及銷售的高科技企業。
公司自主研發的3D機器視覺模組采用激光/DLP白光編碼光柵結構光+雙工業相機方案,還原物體三維信息,廣泛應用于消費電子領域、工業領域和安防領域,具有精度高、速度快、成本低的優勢。
深度相機四大坐標系
在計算機視覺中有四大坐標系,分別是世界坐標系、相機坐標系、圖像坐標系和像素坐標系。這些坐標系間的轉換對視覺系統的定位有著舉足輕重的作用。
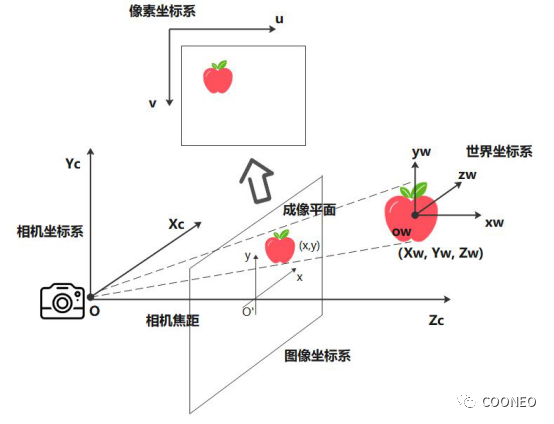
1、像素坐標系(u,v):指圖像處理算法中用到的圖像所在的2D像素坐標系。在圖像上定義直角坐標系u-v,每一像素的坐標(u,v)分別是該像素在數組*中的列數和行數。
注:攝像機采集的數字圖像在計算機內可以存儲為數組。
2、圖像坐標系(x,y):圖像坐標系由相機的成像平面確定,X軸和Y軸與相機坐標軸平行。
3、相機坐標系(Xc,Yc,Zc):相機光心點為O,X軸和Y軸與圖像平面坐標系的x軸和y軸平行,Z軸為相機的光軸,和成像平面垂直。光軸與圖像平面的交點為圖像主點O',由點O與軸組成的直角坐標系稱為相機坐標系。OO'為相機焦距。
4、世界坐標系(Xw,Yw,Zw):世界坐標系是系統的絕對坐標系,在沒有建立用戶坐標系之前畫面上所有點的坐標都是以該坐標系的原點來確定各自的位置的。
坐標系間的轉換
坐標系轉換即將世界坐標系中的3D真實點轉換到通常進行圖像處理時所使用的以像素為單位的2D圖像上。
像素坐標系與圖像坐標系
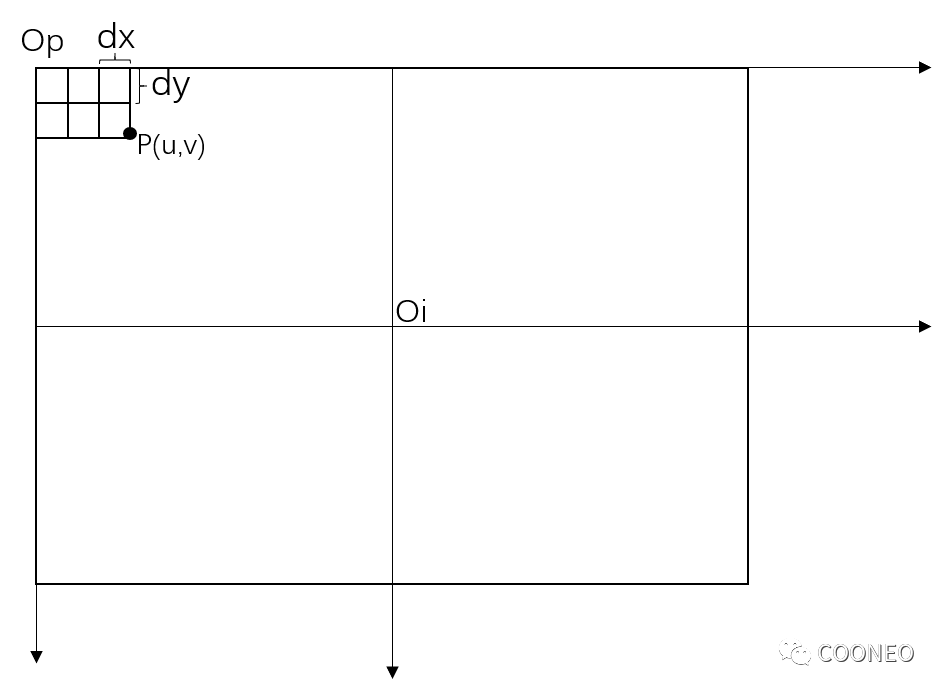
像素坐標系和圖像坐標系都在成像平面上,圖像坐標系的原點為相機光軸與成像平面的交點,而像素坐標系的原點位于圖像左上角,即兩者存在著平移變化。
圖像坐標系的單位通常是mm,而像素坐標系的單位是pixel。感光芯片上每個像素點的實際物理大小dx,dy是相機的內部參數,是連接像素坐標系到圖像坐標系的橋梁,即像素坐標系與圖像坐標系間存在著縮放變化。也就是說通過比例變化和縮放變化可以將像素坐標系轉換成圖像坐標系。
圖像坐標系與相機坐標系
從相機坐標系到圖像坐標系是一個三維坐標到二維坐標(3D->2D)的過程,稱之為透視投影變換,其原理與小孔成像原理相同。通過相機內參,利用相似三角形原理,可實現圖像坐標與相機坐標系間的轉換。
世界坐標系與相機坐標系
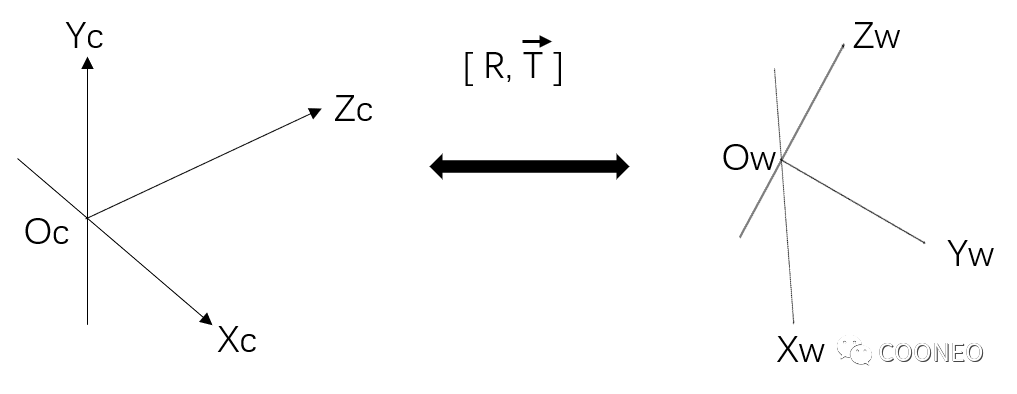
世界坐標與相機坐標都是三維坐標,遵循右手定則且三軸互相垂直。通常通過旋轉和平移的變化(外參矩陣)可以實現兩個坐標系的轉換。
