 中文
中文 ENG
ENG





小優(yōu)智能科技有限公司成立于2015年底,是一家專注于高精度3D機器視覺模組研發(fā)、生產(chǎn)及銷售的高科技企業(yè)。
公司自主研發(fā)的3D機器視覺模組采用激光/DLP白光編碼光柵結(jié)構(gòu)光+雙工業(yè)相機方案,還原物體三維信息,廣泛應用于消費電子領域、工業(yè)領域和安防領域,具有精度高、速度快、成本低的優(yōu)勢。
2017年,搭載結(jié)構(gòu)光技術(shù)的iPhone X一經(jīng)問世,便引來了國內(nèi)各大手機廠商的紛紛效仿,由此三維人臉識別進入大眾視野。人臉識別以其非接觸、便捷、易采集等優(yōu)勢,在眾多生物識別技術(shù)中脫穎而出,在門禁、考勤、安檢通關(guān)等場景廣泛應用。但目前應用的主要是基于可見光的二維人臉識別,由于三維立體信息的缺失,二維識別受環(huán)境光、遮擋等影響嚴重,且防偽能力較差,導致在支付等場景無法使用。三維人臉識別較好的彌補了二維識別的弊端,逐漸成為各家旗艦機型的標配。
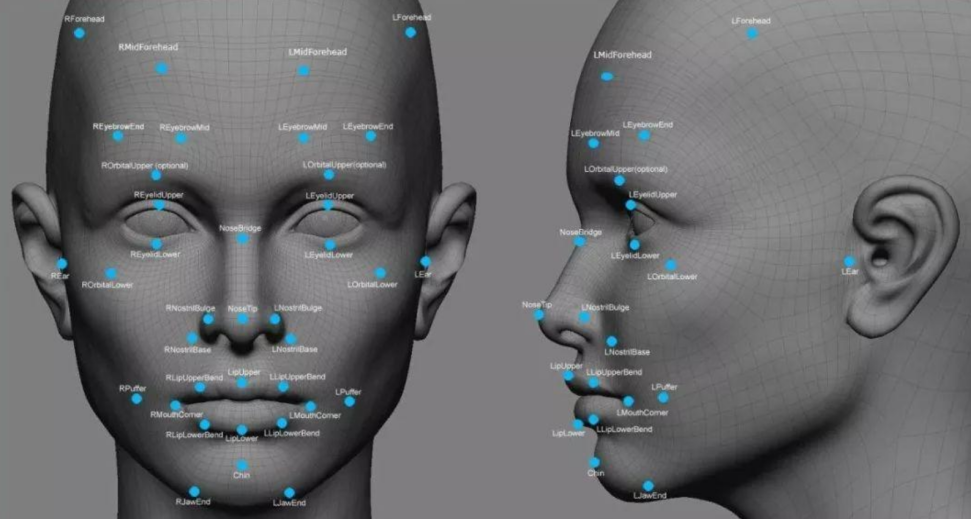
三維人臉識別的第一步就是要獲得三維人臉模型,這里的關(guān)鍵技術(shù)是三維重建,在手機、門禁等消費領域主要用到光學重建。主流的重建方案有三種,分別是結(jié)構(gòu)光方案(Structured Light)、TOF方案(Time Of Flight,時差測距技術(shù))、雙目立體成像方案(Stereo System)。接下來,我們對這三種方案進行簡單介紹。
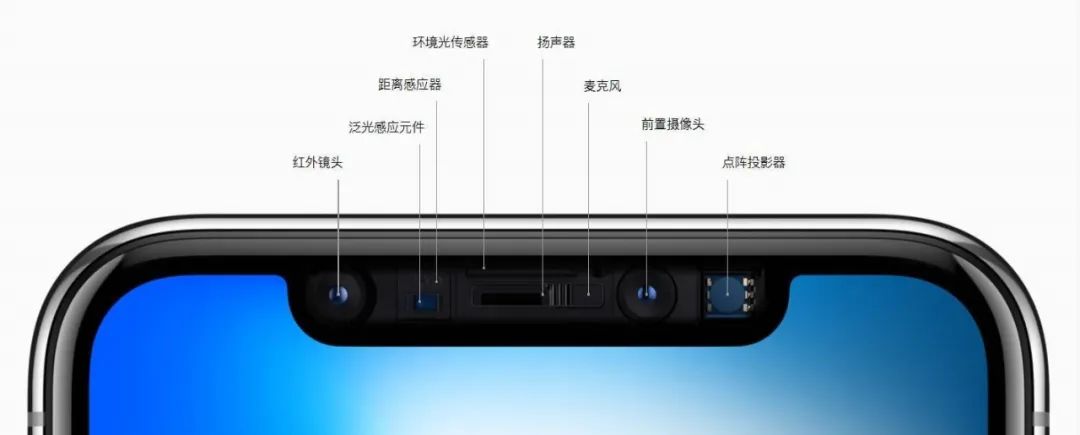
結(jié)構(gòu)光方案的硬件主要由投射器和相機組成,其基本原理是,通過近紅外激光器,將具有一定結(jié)構(gòu)特征的光線投射到被拍攝物體上,再由專門的紅外攝像頭進行采集。這種具備一定結(jié)構(gòu)的光線,會因被攝物體的不同深度區(qū)域,而采集不同的圖像相位信息,然后通過運算單元將這種結(jié)構(gòu)的變化換算成深度信息,以此來獲得三維結(jié)構(gòu)。
結(jié)構(gòu)光方案可以再細分為散斑結(jié)構(gòu)光和編碼結(jié)構(gòu)光,二者基本原理相同,但細節(jié)上還是有差異的。采用散斑結(jié)構(gòu)光的有iPhone X系列、微軟Kinect等,激光通過一個透明散射體(如毛玻璃)時,在散射表面或附近的光場中可以觀察到一種無規(guī)分布的亮暗斑點,這種散斑具有高度的隨機性,而且隨著距離的不同會出現(xiàn)不同的圖案,也就是說,在同一空間中任何兩個地方的散斑圖案都不相同。只要在空間中打上這樣的結(jié)構(gòu)光然后加以記憶就讓整個空間都像是被做了標記,然后把一個物體放入這個空間后只需要從物體的散斑圖案變化就可以知道這個物體的具體位置。
從建模效果以及集成成本來看,結(jié)構(gòu)光這種方案在未來的優(yōu)勢還是很有前景的,可拓展空間會更加廣闊。
2、TOF方案
TOF即為飛行時間法,其測距原理是通過給目標連續(xù)發(fā)送光脈沖,然后用傳感器接收從物體返回的光,通過探測光脈沖的飛行(往返)時間來得到目標物距離。相對于3D結(jié)構(gòu)光的點陣投射,TOF則是一面均勻的光源,雖然精度上遜色于結(jié)構(gòu)光方案,但是速度更快,距離更遠,范圍更大,也得到了比較廣泛的應用。TOF可細分為iTOF-Indirect TOF(間接測量飛行時間)和DTOF-Direct TOF(直接測量飛行時間)。
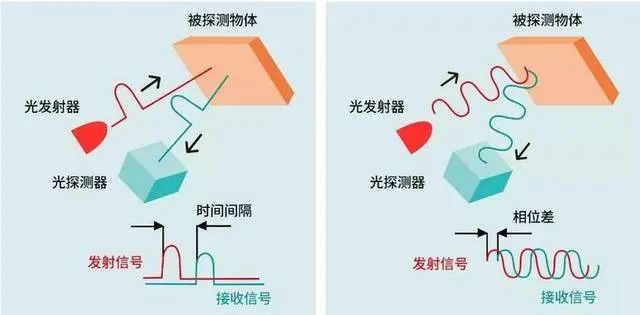
所謂間接測量,即通過測量相位偏移來間接測量光的飛行時間,而不是直接測量光飛行時間。iToF模組的核心組件包含VCSEL(垂直腔面發(fā)射激光器)和圖像傳感器,VCSEL發(fā)射特定頻率的調(diào)制紅外光,圖像傳感器在曝光(積分)時間內(nèi)接收反射光并進行光電轉(zhuǎn)換,計算發(fā)射信號和接收信號之間的相位差,從而獲取目標物體的深度。iTOF硬件成本低,且集成度較高,目前應用較廣,但是其深度精度在cm級,并且隨著測量距離的增大,反射光的強度減小,相位測量的信噪比減小,絕對誤差也會隨之增大。在對精度有高要求的場景無法應用。
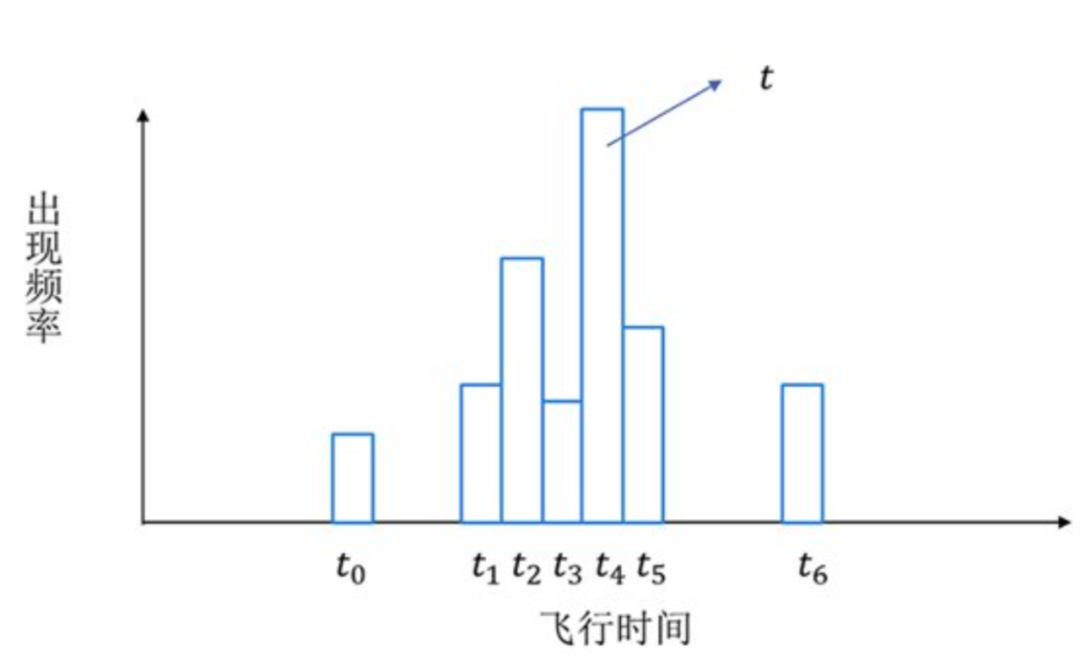
dToF,全稱是direct Time-of-Flight。顧名思義,dToF直接測量飛行時間。dToF核心組件包含VCSEL、單光子雪崩二極管(SPAD)和時間數(shù)字轉(zhuǎn)換器TDC。SinglePhoton Avalanche Diode(SPAD)是一種具有單光子探測能力的光電探測雪崩二極管,只要有微弱的光信號就能產(chǎn)生電流。VCSEL向場景中發(fā)射脈沖波,SPAD接收從目標物體反射回來的脈沖波。Time Digital Converter(TDC)能夠記錄每次接收到的光信號的飛行時間,也就是發(fā)射脈沖和接收脈沖之間的時間間隔。dToF會在單幀測量時間內(nèi)發(fā)射和接收N次光信號,然后對記錄的N次飛行時間做直方圖統(tǒng)計,其中出現(xiàn)頻率最高的飛行時間t用來計算待測物體的深度。
dToF的原理看起來很簡單,但是實際能達到較高的精度很困難。除了對時鐘同步有非常高的精度要求以外,還對脈沖信號的精度有很高的要求。dToF中的核心組件SPAD制作工藝復雜,能勝任生產(chǎn)任務的廠家并不多,并且集成困難。2020年,在最新款iPad Pro中,蘋果首次引入激光雷達掃描儀(LiDAR),就是采用了dTOF的技術(shù)方案。除此之外,目前還沒有其他公司能夠商用dTOF方案。dTOF在精度、功耗、抗干擾等方面都具備iTOF不可比擬的優(yōu)勢,相信隨著蘋果的引入,會有更多廠家推進dTOF的研發(fā)與應用,未來可期。
3、雙目立體成像方案
基于雙目立體視覺的深度相機類似人類的雙眼,和基于TOF、結(jié)構(gòu)光原理的深度相機不同,它不對外主動投射光源,完全依靠拍攝的兩張圖片(彩色RGB或者灰度圖),通過三角形原理計算物體距離,因此有時候也被稱為被動雙目深度相機。該方案作為比較早的三維人臉識別方案,成本最低,建模精度一般,注定只能淪為中端機型的權(quán)宜之計,后續(xù)發(fā)展空間不足。
本文僅做學術(shù)分享,如有侵權(quán),請聯(lián)系刪文
