 中文
中文 ENG
ENG





小優智能科技有限公司成立于2015年底,是一家專注于高精度3D機器視覺模組研發、生產及銷售的高科技企業。
公司自主研發的3D機器視覺模組采用激光/DLP白光編碼光柵結構光+雙工業相機方案,還原物體三維信息,廣泛應用于消費電子領域、工業領域和安防領域,具有精度高、速度快、成本低的優勢。
在機器視覺、圖像測量、攝影測量、三維重建等應用中,為校正鏡頭畸變,確定物理尺寸和像素間的換算關系,以及確定空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系,需要建立相機成像的幾何模型。通過相機拍攝帶有固定間距圖案陣列平板、經過標定算法的計算,可以得出相機的幾何模型,從而得到高精度的測量和重建結果。而帶有固定間距圖案陣列的平板就是標定模板。準確的進行標定對于3D機器視覺像機的成功應用是非常重要的。標定過程中,不同的標定方案可供選擇標定板也不盡相同。為了方便機器視覺行業的從業人員熟悉了解3D機器視覺標定所采用的標定板規格,本文將對標定板的種類和優缺點進行介紹。
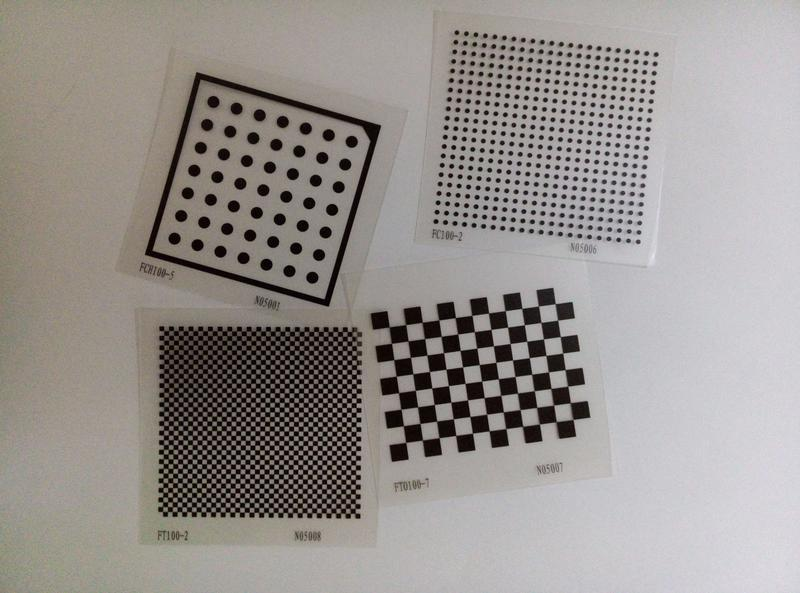
根據標定板的圖案主要可以分為棋盤格標定板,圓點標定板和CharuCo標定板三類。在選擇任意一類標定板時,一個重要的考慮因素是它的物理尺寸。這關系到最終應用的測量視野范圍(FOV)。這是因為相機需要在特定的工作距離上標定。為了精確的標定,當相機視野中,標定板需要能夠填充大部分區域。根據經驗,當正面觀察時,標定板的面積至少應該是可用像素面積的一半。

確認光學系統的性能,復原相機模型的3D空間至2D空間的一一對應關系。棋盤格標定是基于灰度圖像的角點檢測、基于二值圖像的角點檢測、基于輪廓曲線的角點檢測。角點是圖像很重要的特征,對圖像圖形圖形的理解和分析有很重要的作用。對灰度圖像、二值圖像、邊緣輪廓曲線的角點檢測算法進行分析并對各種檢測得出評價。這是最常用的圖案方案。通常通過首先對3D視覺相機圖像進行二值化并找到四邊形(黑色的棋盤區域)來找到棋盤角點的候選點。過濾步驟只保留那些滿足特定大小標準的四邊形,并組織在一個規則的網格結構中,網格結構的尺寸與用戶指定的尺寸匹配。在對標定板進行初步檢測后,可以以非常高的精度確定角點位置。這是因為角基本上是無限小的,因此在透視變換或鏡頭失真下是無偏的。
在OpenCV中,整個棋盤必須在所有圖像中可見才能被檢測到。這通常使得從圖像的邊緣獲取信息變得困難。這些區域通常是很好的信息來源,因為它們適當地約束了鏡頭失真模型。在檢測出棋盤格后,可以進行亞像素細化,以找到具有亞像素精度的點,這利用了給定角點位置周圍像素的確切灰度值,并且精度比整數像素位置所允許的精度要精確得多。關于棋盤格目標的一個重要細節是,為了保持旋轉不變,行數必須是偶數,列數必須是奇數,或者相反。例如,如果兩者都是偶數,則存在180度旋轉的歧義。對于單臺相機的校準,這不是一個問題,但如果相同的點需要由兩個或更多的相機識別(對于立體校準),這種模糊性必須不存在。這就是為什么我們的標準棋盤目標都具有偶數/奇數行/列的屬性。
2、圓點標定板
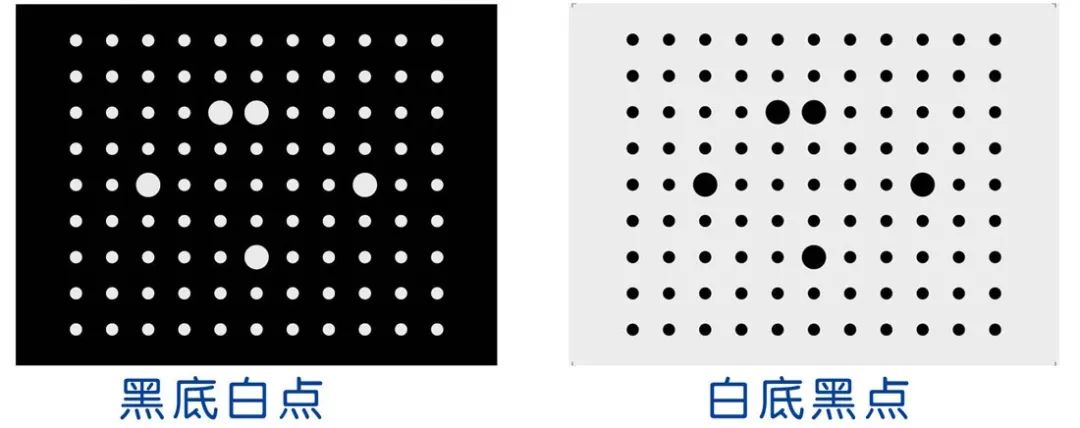
圓點標定板也是一種非常常見的標定板圖案方案。它分為白色背景上的黑色圓形,或者是黑色背景上的白色圓形兩種模式。在圖像處理術語中,圓可以被檢測為圖像中的“斑點”。在這些二元斑點區域上應用一些簡單的條件,如面積、圓度、凸度等,可以去除候選的壞特征點。
在找到合適的候選對象后,再次利用特征的規則結構對模式進行識別和過濾。圓的確定可以非常精確,因為可以使用圓外圍的所有像素,減少了圖像噪聲的影響。然而,與棋盤中的暗點不同的是,在相機視角下,圓形被成像為橢圓。這種觀點可以通過圖像校正來解釋。然而,未知的鏡頭畸變意味著圓不是完美的橢圓,這增加了一個小的偏置。然而,我們可以將畸變模型看作是分段線性的(服從透視變換/單應性),因此在大多數透鏡中,這種誤差非常小。
3、CharuCo標定板
常規的標定過程中,都是用棋盤格標定板(張正友),棋盤圖案的每個角都被兩個黑色方塊圍繞著,可以更精確地細化,但是棋盤板子有個問題,就是不能被遮擋,必須是完全可見的。ArUco板子具有快速檢測和多功能性,然而,ArUco標記的一個問題是,即使經過亞像素細化,它們的角點位置的準確性也不是很高。所以綜上, ChARUco 板子結合兩者,如圖:

CharuCo標定板克服了傳統棋盤的一些限制。然而,它們的檢測算法有點復雜。幸運的是,CharuCo檢測是OpenCVs contrib庫的一部分(從OpenCV 3.0.0開始),這使得集成這個高級方法非常容易。
CharuCo的主要優點是所有光檢查器字段都是唯一編碼和可識別的。這意味著即使是部分遮擋或非理想的相機圖像也可以用于校準。例如,強烈的環形光可能會對標定目標產生不均勻的光照(半鏡面反射區域),這將導致普通棋盤格檢測失敗。使用CharuCo,剩余的鞍點檢測仍然可以使用。鞍點定位可以像棋盤一樣使用亞像素檢測來細化。對于接近圖像角落的觀察區域,這是一個非常有用的屬性。由于目標的定位使得攝像機只能看到它的一部分,所以可以從相機圖像的邊緣和角落收集信息。這通常會帶來確定鏡頭失真參數時的非常好的魯棒性。
