 中文
中文 ENG
ENG





小優智能科技有限公司成立于2015年底,是一家專注于高精度3D機器視覺模組研發、生產及銷售的高科技企業。
公司自主研發的3D機器視覺模組采用激光/DLP白光編碼光柵結構光+雙工業相機方案,還原物體三維信息,廣泛應用于消費電子領域、工業領域和安防領域,具有精度高、速度快、成本低的優勢。
為了便于理解,下面將相機模型從物理成像與數學模型進行介紹。
1、相機模型(物理模型)
針孔相機的模型:三維世界中的物體,經過相機成像系統,變成二維圖像過程如圖1所示。
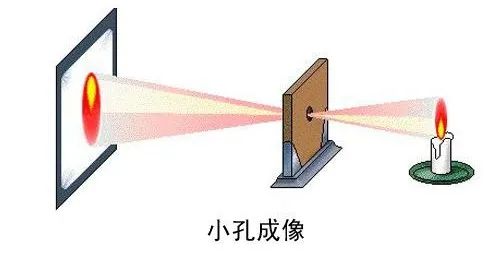
圖1
物理模型如圖1所示,其實在整個成像(相機拍攝)過程,就是一個小孔成像的過程,不涉及到四個坐標系以及坐標系的轉換;現實世界中物體通過鏡頭在相機sensor產生影像,并進行模數轉換,得到的數字圖像,整個過程沒有數學計算;然后可以對得到的圖像各種進行處理,如圖像識別、目標檢測、圖像分割等。
如果僅做圖像層面的處理,了解這么多就足夠了。在圖像測量過程以及機器視覺應用中,我們需要知道像素點與現實世界的對應關系,這時我們需要對相機成像過程進行建模,必須建立相機成像的幾何模型,求出這個模型的參數。
2、相機模型(數學模型/幾何模型)
2.1坐標系
確定空間某點的三維幾何位置與其在圖像中對應點之間的相互關系,相機成像過程建模,必須建立相機成像的幾何模型(各個坐標系),這些坐標系之間的轉換參數就是相機參數。首先引入四個坐標系,坐標系只是對相機建模的工具,并不是平白無故構造的。
世界坐標系:世界坐標系是隨著物體的大小和位置變化的,單位是長度單位;坐標系用 表示。由于攝像機可安放在環境中的任意位置,在環境中選擇一個基準坐標系來描述攝像機的位置,并用它描述環境中任何物體的位置,該坐標系稱為世界坐標系。攝像機坐標系與世界坐標系之間的關系可以用旋轉矩陣與平移向量來描述。
表示。由于攝像機可安放在環境中的任意位置,在環境中選擇一個基準坐標系來描述攝像機的位置,并用它描述環境中任何物體的位置,該坐標系稱為世界坐標系。攝像機坐標系與世界坐標系之間的關系可以用旋轉矩陣與平移向量來描述。
相機坐標系:相機坐標系的原點為光心,單位是長度單位;坐標系用 表示。
表示。
圖像坐標系:圖像坐標系的原點為主點(光軸與圖像平面的交點),單位是長度單位;坐標系用X、Y表示。
像素坐標系:像素坐標系的原點 圖像的左上角;以像素為單位;坐標系用 表示。
表示。
2.2相機幾何模型
建立坐標系后,相機成像過程抽象為坐標轉換關系,如下圖2所示,三維到二維的成像過程可以用數學語言描述。
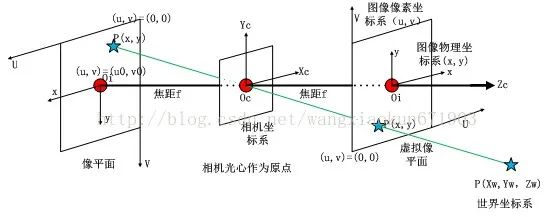
圖2
(1) 針孔中的點被稱為投影中心;
(2) 光軸與圖像平面的交點被稱為主點;
成像儀中心通常不在光軸上,即主點與成像儀中心有偏差;因此引入兩個新的參數 ,
, 表示主點在像素坐標系的位置坐標。
表示主點在像素坐標系的位置坐標。 一般不是正好是圖像分辨率的一半,其是有偏差的,一般越好的攝像頭則其越接近于分辨率的一半。
一般不是正好是圖像分辨率的一半,其是有偏差的,一般越好的攝像頭則其越接近于分辨率的一半。
2.3相機數學公式模型
從世界坐標系到像素坐標系的轉換過程如下:世界坐標系通過外參矩陣轉換到相機坐標系,相機坐標系通過內參矩陣轉換到圖像像素坐標系(這一步是通過兩步完成的,(1)相機坐標系通過焦距對角矩陣和畸變系數轉換到圖像物理坐標系,(2)圖像物理坐標系通過像素轉換矩陣轉換到像素坐標系中)。轉換過程和公式如下:
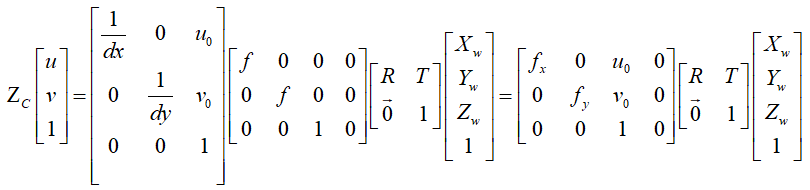
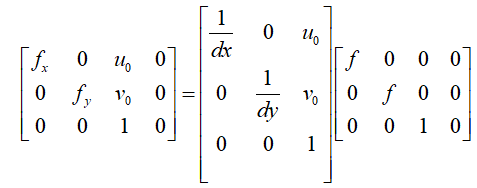
內參矩陣可以表示為:
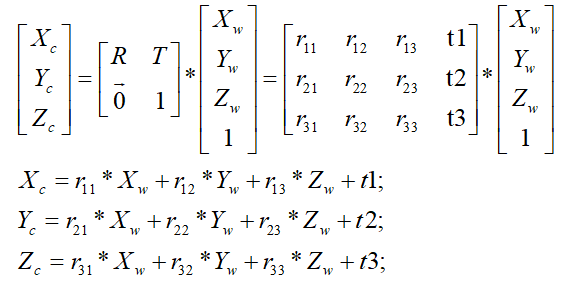
外參矩陣表示為: ,其中R為旋轉矩陣,T為平移向量,詳細計算如下:
,其中R為旋轉矩陣,T為平移向量,詳細計算如下:
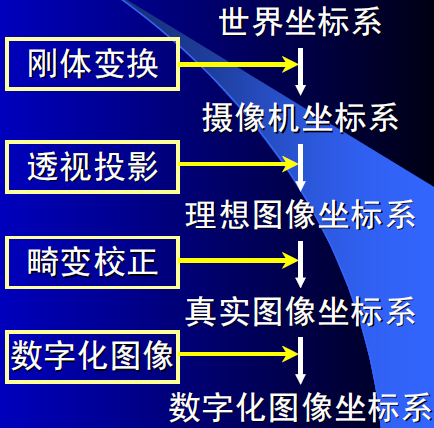
相機光學成像過程的四個步驟:
本文僅做學術分享,如有侵權,請聯系刪文
